
A comprehensive review of machine learning approaches for decision-making in autonomous vehicles collision avoidance systems
DOI:
https://doi.org/10.15282/ijame.23.2.2026.16.1035Keywords:
Autonomous vehicles, Decision-making, Collision avoidance, Machine learning approaches, Deep learning, Reinforcement learningAbstract
Autonomous vehicles (AVs) hold the potential to reduce road accidents statistics through intelligent collision avoidance systems. This paper presents a comprehensive review of machine learning (ML) approaches for decision-making in AV collision avoidance. The comprehensive review is systematically categorized into four categories which are supervised learning (SL), hybrid learning (HL), deep learning (DL), and reinforcement learning (RL). Each category is evaluated in terms of its applicability in decision-making tasks, which include perception for situational awareness task, behavioural-level decision-making task, motion planning task, and multi-agent coordination task. The review highlight that SL methods offer reliable performance in structured scenarios but have constraints under real-world uncertainties. For HL, the methods utilized enable for feature selection and risk prediction improvement but still face challenge of computational overhead. Meanwhile, DL models advance in perception and control enhancement through spatial-temporal reasoning but encounter large-scale data and high processing power demand issue. As for RL, the methods demonstrate advantages of strong adaptability and scalability, supporting multi-agent coordination and decision-making under uncertainty. However, they still face challenges in training efficiency and real-time responsiveness. Based on the findings, the results offer a thorough guide for creating ML-enabled collision avoidance frameworks that are secure, scalable, and reliable for autonomous driving applications. This review also emphasizes existing research challenges such as computational inefficiency, restricted generalization, sensor blockage, and ethical uncertainty in unavoidable collision situations. The review concludes by stating the future research directions toward hybrid architectures, lightweight and edge-deployable models, uncertainty-aware reasoning deployment, and ethically integrated decision-making frameworks. This review provides a structured classification and comparative analysis to guide researchers and practitioners in advancing safer, more robust and socially acceptable autonomous driving systems.
References
[1] M. Faudzi and M. Yusof, “Malaysian value of statistical life for fatal injury in road accident: A conjoint analysis approach,” Journal of Society for Transportation and Traffic Studies, vol. 2, no. 2, pp. 30–40, 2004.
[2] M. H. Azmi, “Statistik kemalangan, kemalangan maut dan kematian jalan raya mengikut jenis jalan,” Sep. 2021. https://www.data.gov.my/data/ms_MY/dataset/statistik-laporan-kemalangan-jalan-raya-diterima-2010-2017 (accessed Dec. 07, 2022).
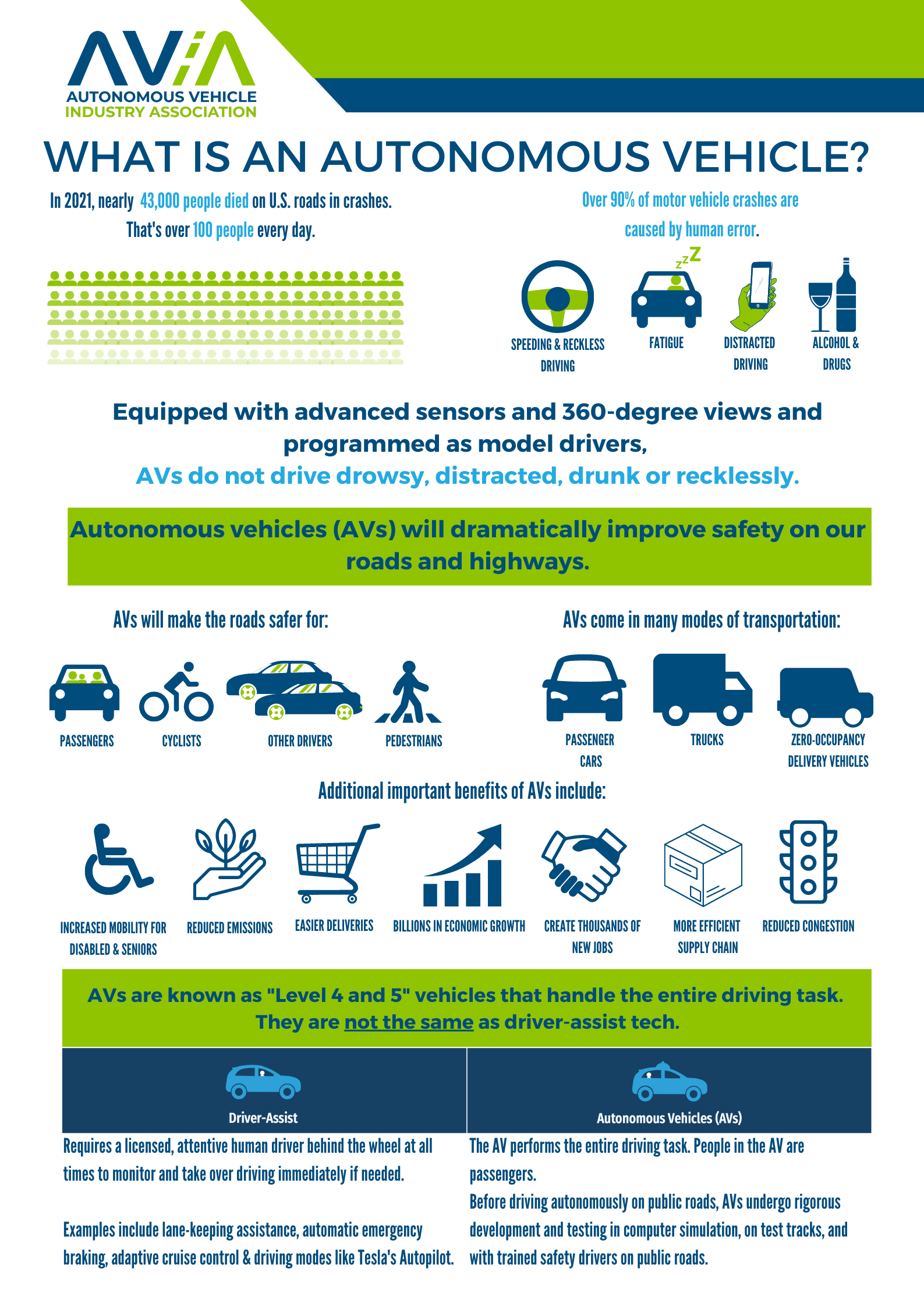
[3] Autonomous Vehicle Industry Association (AVIA), “What is an autonomous vehicle,” Jan. 30, 2023. https://theavindustry.org/resources/fact-sheets/pdf/What-is-an-AV.png (accessed Dec. 23, 2024).
[4] J. Wang, L. Zhang, Y. Huang, J. Zhao, and F. Bella, “Safety of autonomous vehicles,” Journal of Advanced Transportation, vol. 2020, pp. 1–13, 2020. https://doi.org/10.1155/2020/8867757
[5] C. Badue, R. Guidolini, R.V. Carneiro et al., “Self-driving cars: A survey,” Expert Systems with Applications, vol. 165, p. 113816, 2021. https://doi.org/10.1016/j.eswa.2020.113816
[6] D. Garikapati and S. S. Shetiya, “Autonomous vehicles: Evolution of artificial intelligence and the current industry landscape,” Big Data and Cognitive Computing, vol. 8, no. 4. p. 42, Apr. 07, 2024. https://doi.org/10.3390/bdcc8040042
[7] J. Wu, J. Zhang, B. Nie, Y. Liu, and X. He, “Adaptive control of PMSM servo system for steering-by-wire system with disturbances observation,” IEEE Transactions on Transportation Electrification, vol. 8, no. 2, pp. 2015–2028, 2022. https://doi.org/10.1109/TTE.2021.3128429
[8] J. Zhang, J. Wu, J. Liu et al., “Command-filter-adaptive-based lateral motion control for autonomous vehicle,” Control Engineering Practice, vol. 121, p. 105044, 2022. https://doi.org/10.1016/j.conengprac.2021.105044
[9] D. González, J. Pérez, V. Milanés, and F. Nashashibi, “A review of motion planning techniques for automated vehicles,” IEEE Transactions on Intelligent Transportation Systems, vol. 17, no. 4, pp. 1135–1145, 2016. https://doi.org/10.1109/TITS.2015.2498841
[10] H. Fan, F. Zhu, C. Liu, et al., “Baidu Apollo EM motion planner,” arXiv preprint arXiv:1807.08048, 2018. [Online]. Available: http://arxiv.org/abs/1807.08048
[11] C. Liu, C. Y. Lin, and M. Tomizuka, “The convex feasible set algorithm for real time optimization in motion planning,” SIAM Journal on Control and Optimization, vol. 56, no. 4, pp. 2712–2733, 2018. https://doi.org/10.1137/16M1091460
[12] S. M. Veres, L. Molnar, N. K. Lincoln, and C. P. Morice, “Autonomous vehicle control systems — a review of decision making,” in Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, vol. 225, no. 2, pp. 155–195, 2011. https://doi.org/10.1177/2041304110394727
[13] M. F. Yasak, P. M. Heerwan, and V. R. Aparow, “Collision avoidance strategies in autonomous vehicles and on-ramp scenario: A review,” Annual Reviews in Control, vol. 59, no. February, p. 100986, 2025. https://doi.org/10.1016/j.arcontrol.2025.100986
[14] J. Hardy and M. Campbell, “Contingency planning over probabilistic obstacle predictions for autonomous road vehicles,” IEEE Transactions on Robotics, vol. 29, no. 4, pp. 913–929, 2013. https://doi.org/10.1109/TRO.2013.2254033
[15] Z. Li, C. Lu, Y. Yi, and J. Gong, “A hierarchical framework for interactive behaviour prediction of heterogeneous traffic participants based on graph neural network,” IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 7, pp. 9102–9114, 2022. https://doi.org/10.1109/TITS.2021.3090851
[16] Z. Li, J. Gong, C. Lu, and Y. Yi, “Interactive behavior prediction for heterogeneous traffic participants in the urban road: a graph-neural-network-based multitask learning framework,” IEEE/ASME Transactions on Mechatronics, vol. 26, no. 3, pp. 1339–1349, 2021. https://doi.org/10.1109/TMECH.2021.3073736
[17] P. Fiorini and Z. Shiller, “Motion planning in dynamic environments using velocity obstacles,” International Journal of Robotics Research, vol. 17, no. 7, pp. 760–772, 1998. https://doi.org/10.1177/027836499801700706
[18] A. J. M. Muzahid, S. F. Kamarulzaman, M. A. Rahman, S. A. Murad, M. A. S. Kamal, and A. H. Alenezi, “Multiple vehicle cooperation and collision avoidance in automated vehicles: survey and an AI-enabled conceptual framework,” Scientific Reports, vol. 13, no. 1, p. 603, 2023. https://doi.org/10.1038/s41598-022-27026-9
[19] R. Tami, B. Soualmi, A. Doufene, J. Ibanez, and J. Dauwels, “Machine learning method to ensure robust decision-making of AVs,” in 2019 IEEE Intelligent Transportation Systems Conference, ITSC 2019, Oct. 2019, pp. 1217–1222. https://doi.org/10.1109/ITSC.2019.8917085
[20] G. De-Las-Heras, J. Sánchez-Soriano, and E. Puertas, “Advanced driver assistance systems (ADAS) based on machine learning techniques for the detection and transcription of variable message signs on roads,” Sensors, vol. 21, no. 17, pp. 1–18, 2021. https://doi.org/10.3390/s21175866
[21] N. E. Titus, “The role of advanced driver assistance systems (ADAS) In improving road safety,” vol. 3, no. 2, pp. 2–5, 2024.
[22] H. Sun, T. Tanprasert, and R. Setthawong, “A collaborative study of perception and decision-making using machine learning in autonomous vehicles,” Journal of Logistics, Informatics and Service Science, vol. 11, no. 2, pp. 433–450, 2024. https://doi.org/10.33168/JLISS.2024.0227
[23] V. Goar and N. S. Yadav, Foundations of machine learning. 2024. https://doi.org/10.4018/979-8-3693-1598-9.ch002
[24] Y. Baştanlar and M. Ozuysal, Introduction to machine learning Second Edition, vol. 1107, 2014. https://doi.org/10.1007/978-1-62703-748-8_7
[25] M. Kubat, An Introduction to Machine Learning, 2017. https://doi.org/10.1007/978-3-319-63913-0
[26] I. H. Sarker, “Deep Learning: A comprehensive overview on techniques, taxonomy, applications and research directions,” SN Computer Science, vol. 2, no. 6, pp. 1–20, 2021. https://doi.org/10.1007/s42979-021-00815-1
[27] R. K. Mishra, G. Y. S. Reddy, and H. Pathak, “The understanding of deep learning: A comprehensive review,” Mathematical Problems in Engineering, vol. 2021, p. 5548884, 2021. https://doi.org/10.1155/2021/5548884
[28] M. F. Seldin, R. Shigeta, P. Villoslada et al., “European population substructure: Clustering of northern and southern populations,” PLoS Genetics, vol. 2, no. 9, pp. 1339–1351, 2006. https://doi.org/10.1371/journal.pgen.0020143
[29] I. Basu, S. Karmakar, S. K. Kundu, A. Saha, and G. S. Taki, “Application of reinforcement learning for control of autonomous vehicles,” in 2022 International Conference on Interdisciplinary Research in Technology and Management, IRTM 2022 - Proceedings, 2022. https://doi.org/10.1109/IRTM54583.2022.9791531
[30] Z. Yang, X. Pei, J. Xu, X. Zhang, and W. Xi, “Decision-making in Autonomous driving by reinforcement learning combined with Planning & control,” in 2022 6th CAA International Conference on Vehicular Control and Intelligence, CVCI 2022, Oct. 2022, pp. 1–6. https://doi.org/10.1109/CVCI56766.2022.9964691
[31] B. R. Kiran, I. Sobh, V. Talpaert et al., “Deep reinforcement learning for autonomous driving: A survey,” IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 6, pp. 4909–4926, 2022. https://doi.org/10.1109/TITS.2021.3054625
[32] Y. Shi, J. Liu, C. Liu, and Z. Gu, “DeepAD: An integrated decision-making framework for intelligent autonomous driving,” Transportation Research Part A: Policy and Practice, vol. 183, p. 104069, 2024. https://doi.org/10.1016/j.tra.2024.104069
[33] X. Long, H. Ming, and T. Tao, “Vehicle tracking based on Adaboost cascade classifier,” Journal of Physics: Conference Series, vol. 1650, no. 3, p. 032118, 2020. https://doi.org/10.1088/1742-6596/1650/3/032118.
[34] S. Chaudhary, A. Sharma, S. Khichar, Y. Meng, and J. Malhotra, “Enhancing autonomous vehicle navigation using SVM-based multi-target detection with photonic radar in complex traffic scenarios,” Scientific Reports, vol. 14, no. 1, p. 17339, 2024. https://doi.org/10.1038/s41598-024-66850-z
[35] J. Tebart, M. Steeg, and A. Stohr, “Photonics-based FMCW radar localization using direct laser modulation and leaky-wave antenna beam scanning,” International Conference on Infrared, Millimeter, and Terahertz Waves, IRMMW-THz, vol. 2020-Novem, pp. 326–327, 2020. https://doi.org/10.1109/IRMMW-THz46771.2020.9370727
[36] R. Dhawan, K. Moyal, and A. Choudhary, “Optical filter-less photonic FMCW radar for multi-target detection,” IEEE Photonics Technology Letters, vol. 35, no. 2, pp. 81–84, 2023. https://doi.org/10.1109/LPT.2022.3224219
[37] C. Zhao, J. Zhao, Y. Xu, and J. An, “DSG:A Robustness-enhanced self-supervised depth estimation method,” 27th IEEE/ACIS International Summer Conference on Software Engineering Artificial Intelligence Networking and Parallel/Distributed Computing, SNPD 2024 - Proceedings, pp. 91–96, 2024. https://doi.org/10.1109/SNPD61259.2024.10673955
[38] E. Wang, Zhou; Bovik, Alan Conrad; Rahim Sheikh, Hamid; P. Simoncelli, “Image quality assessment: from error visibility to structural similarity,” IEEE Transactions on Image Processing, vol. 13, no. 4, pp. 600–612, 2004, https://doi.org/10.1109/TIP.2003.819861
[39] A. K. Venkataramanan, C. Wu, A. C. Bovik, I. Katsavounidis, and Z. Shahid, “A hitchhiker’s guide to structural similarity,” IEEE Access, vol. 9, pp. 28872–28896, 2021. https://doi.org/10.1109/ACCESS.2021.3056504
[40] J. Stojcheski, T. Nurnberg, M. Ulrich, T. Michalke, C. Glaser, and A. Geiger, “Self-supervised occupancy grid map completion for automated driving,” IEEE Intelligent Vehicles Symposium, Proceedings, vol. 2023-June, 2023, https://doi.org/10.1109/IV55152.2023.10186748
[41] T. Collins, J. J. Collins, and C. Ryan, “Occupancy grid mapping: An empirical evaluation,” 2007 Mediterranean Conference on Control and Automation, MED, 2007. https://doi.org/10.1109/MED.2007.4433772
[42] V. Badrinarayanan, A. Kendall, and R. Cipolla, “SegNet: A deep convolutional encoder-decoder architecture for image segmentation,” IEEE transactions on pattern analysis and machine intelligence, vol. 39, no. 12, pp. 2481–2495, 2017. [Online]. Available: https://arxiv.org/pdf/1511.00561.pdf
[43] W. Weng and X. Zhu, “U-Net: convolutional networks for biomedical image segmentation,” arXiv, vol. 9, pp. 16591–16603, 2015. https://doi.org/10.1109/ACCESS.2021.3053408
[44] N. Siddique, S. Paheding, C. P. Elkin, and V. Devabhaktuni, “U-Net and its variants for medical image segmentation: a review of theory and applications,” IEEE Access, vol. 9, pp. 82031–82057, 2021. https://doi.org/10.1109/ACCESS.2021.3086020
[45] T. Pohlen, A. Hermans, M. Mathias, and B. Leibe, “Full-resolution residual networks for semantic segmentation in street scenes,” Proceedings - 30th IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2017, vol. 2017-Janua, pp. 3309–3318, 2017. https://doi.org/10.1109/CVPR.2017.353
[46] T. Sharma, A. Chehri, I. Fofana, B. Debaque, N. Duclos, and S. Khare, “Deep learning-based road object detection for collision avoidance in autonomous driving,” Proceedings - 2024 IEEE World Forum on Public Safety Technology, WFPST 2024, no. May, pp. 126–131, 2024. https://doi.org/10.1109/WFPST58552.2024.00020
[47] R. Varghese and M. Sambath, “YOLOv8: A novel object detection algorithm with enhanced performance and robustness,” 2024 International Conference on Advances in Data Engineering and Intelligent Computing Systems, ADICS 2024, pp. 1–6, 2024. https://doi.org/10.1109/ADICS58448.2024.10533619
[48] Vivi Afifah and S. Erniwati, “YOLOv8 for object detection: a comprehensive review of advances,techniques, and applications,” IJACI : International Journal of Advanced Computing and Informatics, vol. 2, no. 1, pp. 53–61, 2025. https://doi.org/10.71129/ijaci.v2i1.pp53-61
[49] M. S. Beg, M. Y. Ismail, M. Saef Ullah Miah, and M. H. Peeie, “Enhancing driving assistance system with YOLO V8-Based normal visual camera sensor,” Journal of Advanced Research in Applied Sciences and Engineering Technology, vol. 31, no. 1, pp. 226–236, 2023. https://doi.org/10.37934/ARASET.31.1.226236
[50] J. Duan, H. Ye, H. Zhao, and Z. Li , “Deep cascade adaboost with unsupervised clustering in autonomous vehicles,” Electronics (Switzerland), vol. 12, no. 1, p. 44, 2023. https://doi.org/10.3390/electronics12010044
[51] W. Chen, J. Yan, W. Huang, W. Ge, H. Liu, and H. Yin, “Robust object detection for autonomous driving based on semi-supervised learning,” Security and Safety, vol. 3, p. 2024002, 2024. https://doi.org/10.1051/sands/2024002
[52] K. He, H. Fan, Y. Wu, S. Xie, and R. Girshick, “Momentum contrast for unsupervised visual representation learning,” arXiv, pp. 9729–9738, 2019.
[53] X. Chen, H. Fan, R. Girshick, and K. He, “Improved baselines with momentum contrastive learning,” arXiv, pp. 1–3, 2020. [Online]. Available: http://arxiv.org/abs/2003.04297
[54] X. Liu, H. Yang, Z. Liu, L. Song, H. Li, and Y. Chen, “DPatch: An adversarial patch attack on object detectors,” arXiv preprint arXiv:1806.02299, 2019.
[55] A. Saha, A. Subramanya, K. Patil, and H. Pirsiavash, “Role of spatial context in adversarial robustness for object detection,” IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops, vol. 2020-June, pp. 3403–3412, 2020. https://doi.org/10.1109/CVPRW50498.2020.00400.
[56] K. L. Prabha, J. G. Thatipudi, M. Satyavathi, M. Vohra, B. Viswanathan, and S. Bhattacharjee, “DriveSafeCore: Real-time collision avoidance through spatio-temporal deep learning in autonomous vehicles,” 2025 6th International Conference on Data Intelligence and Cognitive Informatics, ICDICI 2025, pp. 1431–1438, 2025. https://doi.org/10.1109/ICDICI66477.2025.11135181.
[57] A. Singh, Y. Murzello, S. Pokhrel, and S. Samuel, “Classification of moral decision making in autonomous driving: efficacy of boosting procedures,” Information, vol. 15, no. 9, p. 562, 2024. https://doi.org/10.3390/info15090562.
[58] R. E. Schapire, “A brief introduction to boosting,” IJCAI International Joint Conference on Artificial Intelligence, vol. 2, pp. 1401–1406, 1999.
[59] R. E. Schapire, “The boosting approach to machine learning: An Overview BT - nonlinear estimation and classification,” Nonlinear Estimation and Classification, vol. 171, no. Chapter 9, pp. 149–171, 2003. https://doi.org/doi/10.1007/978-0-387-21579-2_9
[60] M. Stamp, “Boost your knowledge of AdaBoost,” no. October, 2019.
[61] J. Wang, H. Wang, M. Fei, and G. Zhou, “Vehicle lane changing game model based on improved SVM algorithm,” World Electric Vehicle Journal, vol. 15, no. 11, 2024. https://doi.org/10.3390/wevj15110505.
[62] Y. Liu, X. Wang, L. Li, S. Cheng, and Z. Chen, “A novel lane change decision-making model of autonomous vehicle based on support vector machine,” IEEE Access, vol. 7, pp. 26543–26550, 2019. https://doi.org/10.1109/ACCESS.2019.2900416.
[63] X. Wang, J. Fan, and N. Liu, “A novel decision-making algorithm of autonomous vehicle based on improved SVM,” in ACM International Conference Proceeding Series, 2020, pp. 643–648. https://doi.org/10.1145/3434581.3434706
[64] M. Karthikeyan, S. Sathiamoorthy, and M. Vasudevan, “Lane keep assist system for an autonomous vehicle using support vector machine learning algorithm,” Lecture Notes on Data Engineering and Communications Technologies, vol. 46, no. December, pp. 101–108, 2020. https://doi.org/10.1007/978-3-030-38040-3_11
[65] Y. Wang, G. Yin, Y. Li et al., “Self-learning control for coordinated collision avoidance of automated vehicles,” Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, vol. 235, no. 4, pp. 1149–1163, 2021. https://doi.org/10.1177/0954407019887884
[66] A. Kane and A. Hussain, “Artificial neural networks - An overview,” Indian Drugs, vol. 30, no. 5, pp. 168–178, 1993. https://doi.org/10.58496/mjcsc/2023/015
[67] I. A. Basheer and M. Hajmeer, “Artificial neural networks: Fundamentals, computing, design, and application,” Journal of Microbiological Methods, vol. 43, no. 1, pp. 3–31, 2000. https://doi.org/10.1016/S0167-7012(00)00201-3
[68] F. Laneve, A. Rucco, and M. Bertozzi, “A hybrid approach combining upper-level policy search and mpc for lane change of autonomous vehicles,” 2024 European Control Conference, ECC 2024, pp. 3156–3163, 2024. https://doi.org/10.23919/ECC64448.2024.10590819
[69] R. A. Levine and G. Casella, “Implementations of the monte carlo EM algorithm,” Journal of Computational and Graphical Statistics, vol. 10, no. 3, pp. 422–439, 2001. https://doi.org/10.1198/106186001317115045
[70] W. Ruth, “A review of Monte Carlo-based versions of the EM algorithm,” arXiv, 2024, [Online]. Available: https://arxiv.org/abs/2401.00945v1
[71] T. Wang, Z. Guan, T. Peng, D. Li, and R. Zhao, “Human-like Decision Making for Autonomous Lane Changing Using Deep Learning,” in Proceedings of 2021 IEEE 2nd International Conference on Information Technology, Big Data and Artificial Intelligence, ICIBA 2021, 2021, pp. 950–955. https://doi.org/10.1109/ICIBA52610.2021.9688311
[72] S. Hochreiter and J. Schmidhuber, “Long short-term memory,” Neural Computation, vol. 9, no. 8, pp. 1735–1780, 1997.
[73] R. C. Staudemeyer and E. R. Morris, “Understanding LSTM -- a tutorial into long short-term memory recurrent neural networks,” pp. 1–42, 2019. [Online]. Available: http://arxiv.org/abs/1909.09586
[74] D. P. Kingma and J. L. Ba, “Adam: A method for stochastic optimization,” 3rd International Conference on Learning Representations, ICLR 2015 - Conference Track Proceedings, pp. 1–15, 2015.
[75] J. Fan, Z. Wang, Y. Xie, and Z. Yang, “A Theoretical analysis of deep Q-learning,” Proceedings of Machine Learning Research, vol. 120, pp. 486–489, 2020.
[76] M. Sewak, Deep Reinforcement Learning, Singapore: Springer Nature Singapore Pte Ltd., 2019. https://doi.org/10.1007/978-981-13-8285-7
[77] E. H. Sumiea, S.J. Abdulkadir, H.S. Alhussian et al., “Deep deterministic policy gradient algorithm: A systematic review,” Heliyon, vol. 10, no. 9, p. e30697, 2024. https://doi.org/10.1016/j.heliyon.2024.e30697
[78] V. Sumalatha and S. Pabboju, “An overview of deep deterministic policy gradient algorithm and applications,” vol. 26, no. 5, pp. 26–28, 2024. https://doi.org/10.9790/0661-2605032628
[79] N. Darapaneni et al., “Autonomous car driving using deep learning,” in ICSCCC 2021 - International Conference on Secure Cyber Computing and Communications, May 2021, pp. 29–33. https://doi.org/10.1109/ICSCCC51823.2021.9478090
[80] X. Shi, Y. D. Wong, C. Chai, and M. Z. F. Li, “An Automated machine learning (AutoML) method of risk prediction for decision-making of autonomous vehicles,” IEEE Transactions on Intelligent Transportation Systems, vol. 22, no. 11, pp. 7145–7154, 2021. https://doi.org/10.1109/TITS.2020.3002419
[81] P. Liu and W. Fan, “Extreme gradient boosting (XGBoost) model for vehicle trajectory prediction in connected and autonomous vehicle environment,” Promet - Traffic and Transportation, vol. 33, no. 5, pp. 767–774, 2021. https://doi.org/10.7307/PTT.V33I5.3779
[82] W. Rong, J. Zheng, Y. Chen, Y. Liu, and Z. Zhang, “Autonomous collision avoidance decision-making method with human-like attention distribution for MASSs based on GMA-TD3 algorithm,” Ocean Engineering, vol. 330, p. 121118, 2025. https://doi.org/10.1016/j.oceaneng.2025.121118
[83] M. Morari and J. H. Lee, “Model predictive control: Past, present and future,” Computers and Chemical Engineering, vol. 23, no. 4–5, pp. 667–682, 1999. https://doi.org/10.1016/S0098-1354(98)00301-9
[84] F. Mohseni, S. Voronov, and E. Frisk, “Deep learning model predictive control for autonomous driving in unknown environments,” IFAC-PapersOnLine, vol. 51, no. 22, pp. 447–452, 2018. https://doi.org/10.1016/J.IFACOL.2018.11.593
[85] M. Bouton, A. Nakhaei, K. Fujimura, and M. J. Kochenderfer, “Scalable decision making with sensor occlusions for autonomous driving,” in Proceedings - IEEE International Conference on Robotics and Automation, Sep. 2018, pp. 2076–2081. https://doi.org/10.1109/ICRA.2018.8460914
[86] H. Kurniawati, D. Hsu, and W. S. Lee, “SARSOP: Efficient point-based POMDP planning by approximating optimally reachable belief spaces,” Robotics: Science and Systems, vol. 4, pp. 65–72, 2009. https://doi.org/10.7551/mitpress/8344.003.0013
[87] D. Hsu, W. S. Lee, and N. Rong, “A point-based POMDP planner for target tracking,” Proceedings - IEEE International Conference on Robotics and Automation, pp. 2644–2650, 2008. https://doi.org/10.1109/ROBOT.2008.4543611
[88] N. Saldi, S. Sanjari, and S. Yuksel, “Quantum Markov decision processes: general theory, approximations, and classes of policies,” pp. 1–30, 2024. [Online]. Available: http://arxiv.org/abs/2402.14649
[89] M. S. Ying, Y. Feng, and S. G. Ying, “Optimal policies for quantum markov decision processes,” International Journal of Automation and Computing, vol. 18, no. 3, pp. 410–421, 2021. https://doi.org/10.1007/s11633-021-1278-z
[90] D. S. Gonzalez, M. Garzon, J. S. Dibangoye, and C. Laugier, “Human-like decision-making for automated driving in highways,” in 2019 IEEE Intelligent Transportation Systems Conference, ITSC 2019, Oct. 2019, pp. 2087–2094. https://doi.org/10.1109/ITSC.2019.8917449.
[91] I. Chadès, L. V. Pascal, S. Nicol, C. S. Fletcher, and J. Ferrer-Mestres, “A primer on partially observable Markov decision processes (POMDPs),” Methods in Ecology and Evolution, vol. 12, no. 11, pp. 2058–2072, 2021. https://doi.org/10.1111/2041-210X.13692.
[92] S. James, G. Konidaris, and B. Rosman, “An analysis of Monte Carlo tree search,” 31st AAAI Conference on Artificial Intelligence, AAAI 2017, no. 1983, pp. 3576–3582, 2017. https://doi.org/10.1609/aaai.v31i1.11028.
[93] A. R. Syamil and D. Kum, “Learning homotopy prediction for optimization-based trajectory planners for autonomous driving,” International Journal of Automotive Technology, vol. 27, no. 1, pp. 59–69, 2025. https://doi.org/10.1007/s12239-025-00257-1.
[94] S. R. Arumugam, P. Sheela Gowr, J. P. Ananth, S. G. Karuppasamy, S. Palani, and J. Elavarasi, “Empowering autonomous vehicles to make challenging options in unexpected circumstances with hybrid learning,” Proceedings of 3rd International Conference on Sustainable Computing and Data Communication Systems, ICSCDS 2025, pp. 1383–1387, 2025. https://doi.org/10.1109/ICSCDS65426.2025.11167771
[95] J. Liang, C. Tan, L. Yan, J. Zhou, G. Yin, and K. Yang, “Interaction-aware trajectory prediction for safe motion planning in autonomous driving: A transformer-transfer learning approach,” IEEE Transactions on Intelligent Transportation Systems, vol. 26, no. 10, pp. 17080–17095, 2025. https://doi.org/10.1109/TITS.2025.3588228
[96] R. Chekroun, T. Gilles, M. Toromanoff, S. Hornauer, and F. Moutarde, “MBAPPE: MCTS-built-around prediction for planning explicitly,” IEEE Intelligent Vehicles Symposium, Proceedings, pp. 2062–2069, 2024. https://doi.org/10.1109/IV55156.2024.10588457
[97] Y. Liao, G. Yu, P. Chen, B. Zhou, and H. Li, “Integration of decision-making and motion planning for autonomous driving based on double-layer reinforcement learning framework,” IEEE Transactions on Vehicular Technology, vol. 73, no. 3, pp. 3142–3158, 2023. https://doi.org/10.1109/TVT.2023.3326548
[98] J. Gao, N. Liu, H. Li, Z. Li, C. Xie, and Y. Gou, “Reinforcement learning decision-making for autonomous vehicles based on semantic segmentation,” Applied Sciences (Switzerland), vol. 15, no. 3, 2025, doi: 10.3390/app15031323
[99] M. Thoma, “A survey of semantic segmentation,” pp. 1–16, 2016. [Online]. Available: http://arxiv.org/abs/1602.06541
[100] S. Mishra and A. Arora, “Double deep Q network with huber reward function for cart-pole balancing problem,” International Journal of Performability Engineering, vol. 18, no. 9, pp. 644–653, 2022. https://doi.org/10.23940/ijpe.22.09.p5.644653
[101] J. Schulman, F. Wolski, P. Dhariwal, A. Radford, and O. Klimov, “Proximal policy optimization algorithms,” pp. 1–12, 2017, [Online]. Available: http://arxiv.org/abs/1707.06347
[102] Y. Guo, Y. Liu, T. Georgiou, and M. S. Lew, “A review of semantic segmentation using deep neural networks,” International Journal of Multimedia Information Retrieval, vol. 7, no. 2, pp. 87–93, 2018. https://doi.org/10.1007/s13735-017-0141-z
[103] S. Chen, M. Wang, W. Song, Y. Yang, and M. Fu, “Multi-agent reinforcement learning-based decision making for twin-vehicles cooperative driving in stochastic dynamic highway environments,” IEEE Transactions on Vehicular Technology, vol. 72, no. 10, pp. 12615–12627, 2023. https://doi.org/10.1109/TVT.2023.3275582
[104] S. V Albrecht and L. Schäfer, Multi-agent reinforcement learning: Foundations and modern approaches. London, England: The MIT Press, 2024.
[105] Z. Zhou, G. Liu, and Y. Tang, “Multi-agent reinforcement learning: methods, applications, visionary prospects, and challenges,” vol. 1, no. 1, pp. 1–43, 2023. https://doi.org/10.1109/TIV.2024.3408257
[106] S. Jagan, G. K. Jadhav, C. Priya, P. Adhikary, U. M. Bhatt, and V. Jayasri, “Reinforcement learning-based autonomous collision prediction and avoidance system for vehicles,” Proceedings of the 2023 International Conference on Innovative Computing, Intelligent Communication and Smart Electrical Systems, ICSES 2023, no. December 2023, pp. 1–5, 2023. https://doi.org/10.1109/ICSES60034.2023.10465417
[107] C. Guo, J. Wu, P. Luo et al., “Hybrid reinforcement learning-based collision avoidance algorithm for autonomous vehicle clusters,” IEEE Access, vol. 13, no. February, pp. 61564–61577, 2025. https://doi.org/10.1109/ACCESS.2025.3553968
[108] A. Ellouze, M. Karray, and M. Ksantini, “A hybrid decision-making framework for autonomous vehicles in urban environments based on multi-agent reinforcement learning with explainable AI,” Vehicles, vol. 8, no. 1, p. 8, 2026. https://doi.org/10.3390/vehicles8010008
[109] J. Shi, M. Zhang, J. Zhou, and S. Pan, Reinforcement learning decision-making for autonomous driving based on attention mechanism. InProceedings of the 2024 Guangdong-Hong Kong-Macao Greater Bay Area International Conference on Digital Economy and Artificial Intelligence, pp. 867-874, 2024. https://doi.org/10.1145/3675417.3675561
[110] M. Wu, F. R. Yu, and P. X. Liu, “A collective and continuous rule learning framework towards enhanced driving safety and decision transparency,” IEEE Transactions on Vehicular Technology, vol. 73, no. 10, pp. 14275–14290, 2024. https://doi.org/10.1109/TVT.2024.3398661
[111] G. P. Antonio and C. Maria-Dolores, “Multi-agent deep reinforcement learning to manage connected autonomous vehicles at tomorrow’s intersections,” IEEE Transactions on Vehicular Technology, vol. 71, no. 7, pp. 7033–7043, 2022. https://doi.org/10.1109/TVT.2022.3169907
[112] N. Kassem, S. Eid, and Y. Elshaer, “Towards fully autonomous driving: classical and deep learning methods novel integration in a hybrid decision-making framework,” IEEE Transactions on Intelligent Vehicles, vol. 11, no. 4, pp. 477–488, 2026. https://doi.org/10.1109/TIV.2026.3658258
[113] J. Tang, X. Luo, J. Chen, Y. Yuan, and J. Loo, “An ethical decision making algorithm for autonomous vehicles during an inevitable collision,” Proceedings of 2024 4th International Conference on Big Data, Artificial Intelligence and Risk Management, ICBAR 2024, pp. 1077–1081, 2025. https://doi.org/10.1145/3718751.3718928
Downloads
Published
Issue
Section
License
Copyright (c) 2026 The Author(s)

This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License.








{kind=link}